Технологія LiDAR: атрибути, обмеження та поради для досягнення оптимальних результатів
Технологія LiDAR: атрибути, обмеження та найкращі практики використання
Технологія LiDAR (Light Detection and Ranging - світлове виявлення та визначення дальності) стала революційною в різних галузях, оскільки сенсори з роками стають компактнішими та доступнішими. Від лазерного альтиметра NASA Apollo 17 вагою 23 кг до першого комерційно доступного, масово виробленого 3D LiDAR, що працює в режимі реального часу, і тепер - твердотільного LiDAR-чіпа розміром з кінчик пальця, розробленого вченими Каліфорнійського університету в Берклі.
В міру того, як LiDAR та рішення для одночасної локалізації та картографування (SLAM) переходять з дослідницьких лабораторій до промислових застосувань, такі галузі, як архітектура та будівництво, автономні транспортні засоби та лісове господарство, отримують вигоду від насичених та відносно доступних даних.
У цій статті ми розглянемо атрибути та обмеження LiDAR-сенсорів, а також те, як найкраще використовувати портативні лазерні сканери, такі як FJD Trion S1 та FJD Trion P1, для досягнення оптимальних результатів.
Атрибути LiDAR-сенсорів
LiDAR-сенсори випромінюють світло у вигляді лазерних імпульсів для вимірювання відстаней. Вони відомі своєю точністю та здатністю фіксувати детальні 3D-дані. Однак, як і будь-яка технологія, вони мають свої обмеження та специфічні атрибути, які слід враховувати:
- Пряма видимість: LiDAR не може "бачити" крізь тверді предмети або густий дим. Важливо відповідно планувати свої місії сканування, забезпечуючи відсутність перешкод у критичних зонах.
- Відбиваючі поверхні: Сильно відбиваючі поверхні, такі як скло або метал, можуть спричиняти багаторазові відбиття або "луну", що може призвести до неточностей у даних.
- Діапазон: LiDAR-сенсори мають максимальний діапазон сканування, на який може впливати відбивна здатність сканованих поверхонь. Переконайтеся, що ви скануєте в межах цього діапазону, щоб отримати точні дані.
- Поле зору (FOV): LiDAR-сенсори мають різні FOV, і важливо розуміти FOV вашого конкретного сканера, щоб ви могли розташувати його таким чином, щоб він міг захопити простір під правильним кутом.
Загальні рекомендації
- Планування та підготовка: Ретельно сплануйте процес сканування, враховуючи специфіку середовища та потенційні проблеми. Максимально очистіть зону від рухомих об'єктів та людей. Тримайте сканування в межах 15 хвилин і забезпечте замикання циклів для оптимальних результатів.
- Використання мішеней та контрольних мереж: Розгорніть опорні мішені в зоні сканування, щоб допомогти в реєстрації даних.
- Постобробка: Інвестуйте в надійне програмне забезпечення для пост-обробки, таке як FJD Trion Model, для очищення та уточнення даних хмари точок.
- Документація: Ведіть детальний облік процесу сканування, включаючи параметри сканування та будь-які внесені корективи для врахування проблем. Чітко називайте та маркуйте свої завдання сканування для зручної організації.
Проблеми, які слід враховувати, та найкращі практики їх вирішення
Під час сканування зверніть увагу на такі фактори, які можуть вплинути на якість даних:
- Рухомі об'єкти/люди: LiDAR-сенсори чутливі до руху. Будь-які рухомі об'єкти або люди в зоні сканування можуть призвести до неточностей. В ідеалі очистіть зону перед скануванням або відведіть сканер в сторону, якщо ви зіткнулися з надмірними рухами. Дверні стопори стануть у нагоді для фіксації дверей.
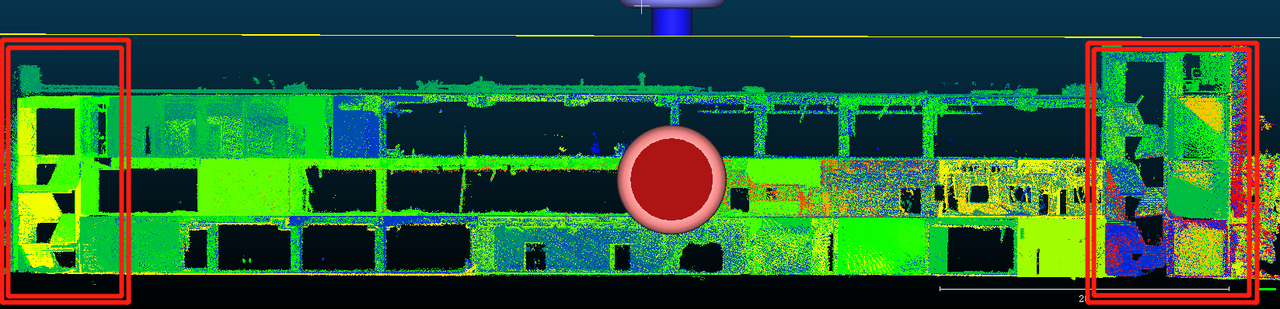
- Вузькі коридори: Тісні простори можуть обмежувати поле зору LiDAR, що може призвести до прогалин у даних або помилок, таких як дрейф. Ретельно сплануйте траєкторію сканування у вузьких місцях, додайте елементи, розмістивши стільці або столи, якщо це можливо. Найкраще сканувати коридори окремо від основних завдань сканування, щоб легше ізолювати проблеми.
- Скло та прозорі поверхні: Імпульси LiDAR можуть проходити крізь скло, що ускладнює збір даних лише з одного боку. Відбиваючі поверхні, такі як дзеркала, можуть "збити з пантелику" LiDAR, і рекомендується закрити їх перед скануванням.
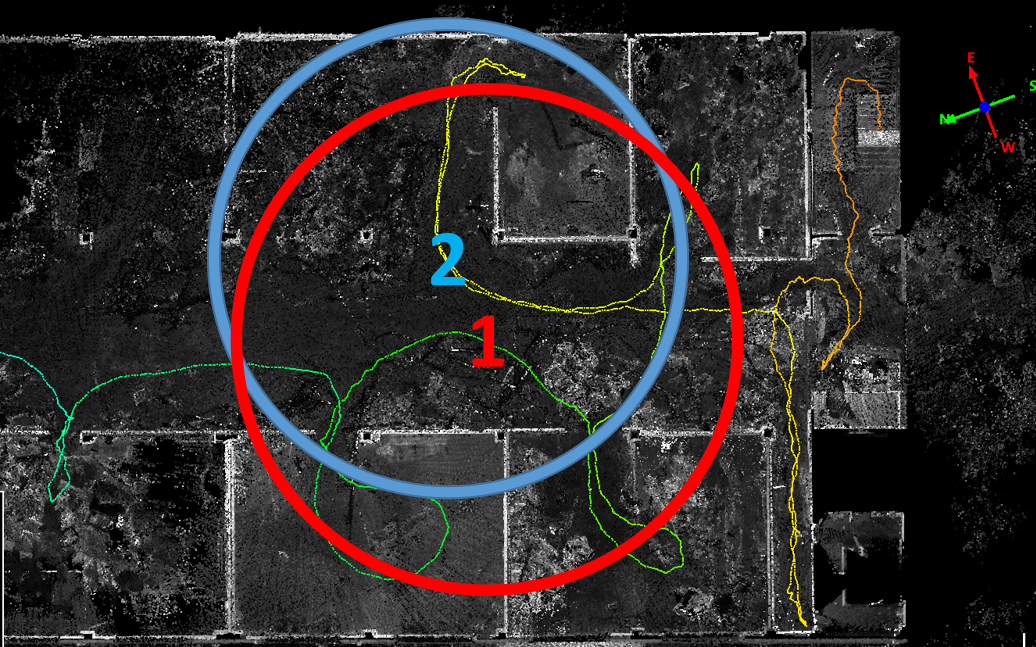
- Великі відкриті простори: Відкрите середовище з невеликою кількістю споруд створює труднощі. Використовуйте контрольну мережу з контрольними точками, виміряними тахеометрами або шаховими мішенями, та використовуйте картографування з підтримкою RTK для досягнення оптимальних результатів.
- Перехід між внутрішніми та зовнішніми просторами: Зміна умов освітлення, поверхонь, доступності функцій при переході з внутрішніх приміщень на зовнішні простори може створювати труднощі. Рухайтеся повільно та направляйте сканер так, щоб він "бачив" як останню частину кімнати, так і новий простір, в який ви входите.
Чому важливо замикати цикли
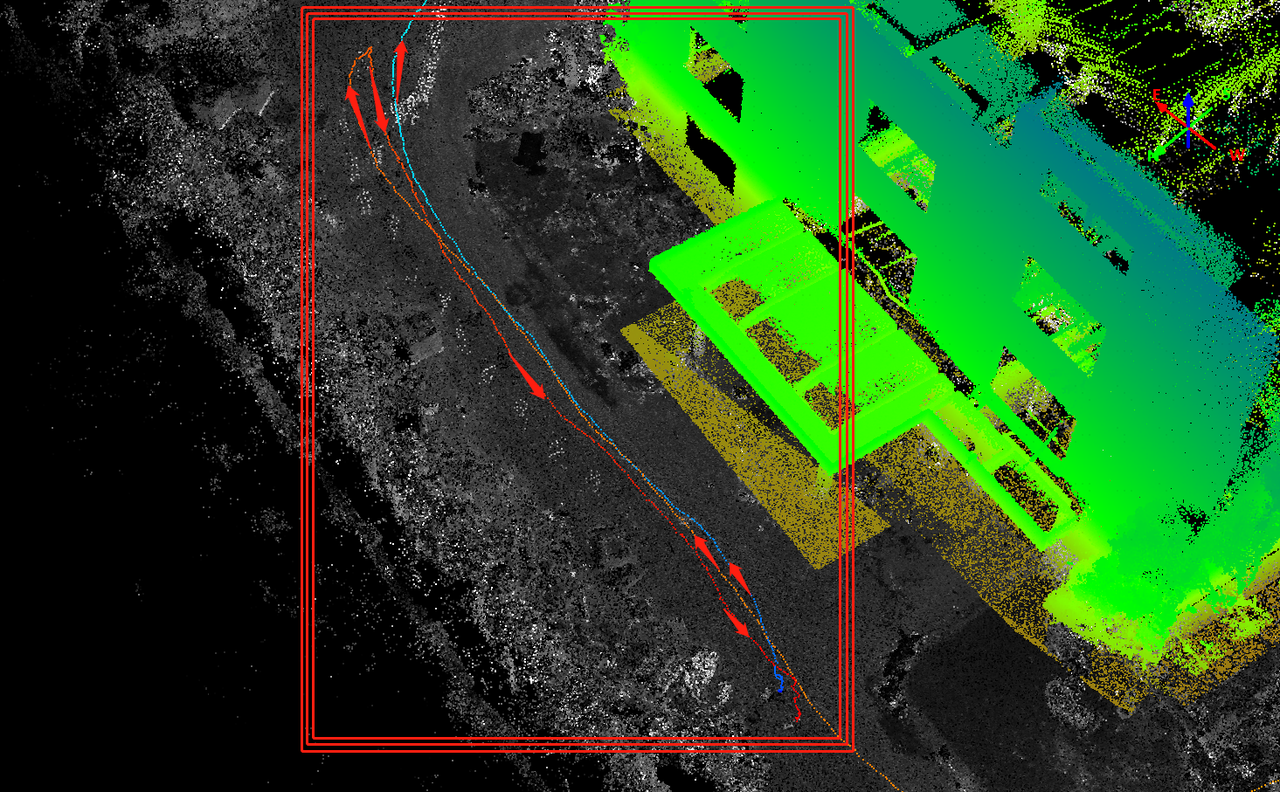
Замикання циклу є критично важливим поняттям у LiDAR-скануванні. Воно передбачає забезпечення того, щоб початкова точка сканованого середовища збігалася з кінцевою точкою, створюючи безперервний цикл з перекриттям від 5 до 10 метрів.
Замикання циклів є важливим з кількох причин:
- Цілісність даних: Це допомагає перевірити точність даних. LiDAR-сенсори накопичують помилки з часом, а замикання циклів передбачає повторне відвідування відомого місця під час сканування, що дозволяє системі виправляти будь-які накопичені помилки, вирівнювати нові дані з раніше отриманими даними та мінімізувати дрейф.
- Зшивання даних: Під час сканування великих площ замикання циклів дозволяє об'єднувати окремі скани в єдину хмару точок.
- Контроль якості: Замикання циклів спрощує контроль якості. Дані, що перекриваються, дозволяють легше виявляти та виправляти помилки у ваших сканах.
Ключові висновки
- Оцініть місцевість перед скануванням
- Уникайте рухомих людей або об'єктів
- Ініціалізуйте на рівній поверхні
- Замикайте цикли (великі та малі)!
- Обережно переходьте між просторами
LiDAR-сканування - це потужний інструмент для створення точних 3D-моделей та збору просторових даних. Розуміючи обмеження LiDAR та дотримуючись найкращих практик, ви можете подолати труднощі та забезпечити якість та надійність своїх даних.
















































































































